三墾變頻器在FDY高速紡機(jī)上的應(yīng)用
發(fā)布時(shí)間:2019-06-18 15:51:25來(lái)源:

設(shè)備參數(shù):
永磁同步電機(jī): 2P 270Hz
三相220V交流輸入
額定電流15A
速度傳感器: 4p/r 電壓輸出形式
摩擦輥直徑: 126mm

關(guān)于速度傳感器
PG脈沖輸入范圍為50-2048p/r,測(cè)速傳感器為4p/r。以cd156所設(shè)定的數(shù)值進(jìn)行內(nèi)部倍率換算。
關(guān)于邏輯控制的切換
以一臺(tái)PLC作為核心控制單元,控制v/f與PID,升速及換軸等信號(hào)的邏輯切換,并以PLC接收的傳感器信號(hào)經(jīng)計(jì)算轉(zhuǎn)換后作為線速度的顯示。
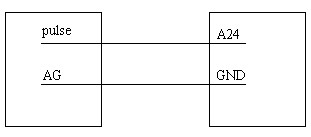
該速度傳感器為電壓輸出,電壓幅值在 DC13V左右,其接線方式如下:
系統(tǒng)構(gòu)成
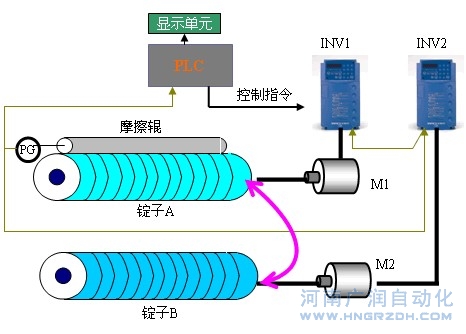
圖1 控制結(jié)構(gòu)圖
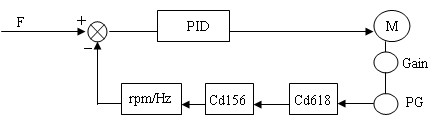
關(guān)于線速度恒定控制
隨著紗錠卷徑的增加,以PG反饋來(lái)進(jìn)行PID模式控制,獲得恒定線速度。
Cd071=3 選擇內(nèi)置PID控制模式
Cd120=99 選擇以PG作為PID控制模式的反饋信號(hào)
Cd155=1 選擇PI的正負(fù)增益功能
如下圖,輸入變頻器的運(yùn)轉(zhuǎn)指令,V/F控制結(jié)束,開(kāi)始PID控制,指令頻率與反饋頻率的偏差值經(jīng)過(guò)PID運(yùn)算,輸出頻率讓反饋信號(hào)跟蹤指令值不斷變化,實(shí)現(xiàn)恒定線速度自動(dòng)過(guò)程控制。考慮到在收卷的工藝過(guò)程中,隨著卷徑增大,角速度W的減小,正負(fù)偏差的調(diào)節(jié)量不同,通過(guò)軟件用戶化功能,引進(jìn)PI的正負(fù)增益功能,達(dá)到優(yōu)化調(diào)節(jié)的目的
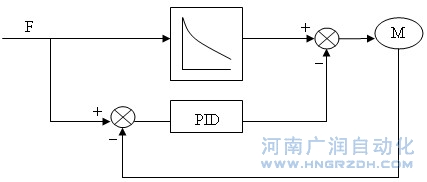
增加卷繞曲線的控制
在線速度的控制過(guò)程中,將卷繞速度預(yù)測(cè)的圖形運(yùn)轉(zhuǎn)作為基本控制,用以減小PID的補(bǔ)償量,使控制過(guò)程更早地趨向于穩(wěn)定。
只要事先根據(jù)工藝要求輸入設(shè)定卷繞開(kāi)始頻率、結(jié)束頻率、卷繞所需時(shí)間,作為對(duì)卷粗現(xiàn)象的輸出頻率預(yù)測(cè)圖形,進(jìn)行自動(dòng)計(jì)算。
可以預(yù)先設(shè)定4種圖形,通過(guò)外部端子信號(hào)予以選擇。
參數(shù)設(shè)定
指令碼 設(shè)定值 指令碼 設(shè)定值
Cd005 200 Cd120 99
Cd006 90 Cd122 0.4
Cd007 190 Cd123 0.8
Cd029 130.53 Cd155 1
Cd030 179.89 Cd156 10
Cd031 180.21 Cd157 0.4
Cd033 177 Cd158 0.8
Cd034 178.77 Cd605 2
Cd071 3 Cd618 84
Cd101 6
結(jié)束語(yǔ)

本系統(tǒng)采用SAMCO-vm05作為驅(qū)動(dòng)單元,提供了類(lèi)似之高速卷繞設(shè)備的完美解決方案,具有以下優(yōu)點(diǎn):
目標(biāo)速度在運(yùn)行中可根據(jù)張力信號(hào)的大小予以調(diào)整
PID過(guò)程控制與PLC邏輯控制的有效結(jié)合,依據(jù)工藝要求,完成多檔速及控制模式的切換,使復(fù)雜的控制變得簡(jiǎn)單
內(nèi)置PID與卷繞曲線的結(jié)合,使控制精度穩(wěn)定在1‰以?xún)?nèi)
控制集成度高,依靠變頻器自身構(gòu)成速度閉環(huán),無(wú)需額外調(diào)節(jié)器。
穩(wěn)定可靠,設(shè)備維護(hù)量小